Wearables are Changing Surgical Robotics, Here’s How
Wearable medical devices have transformed the way we monitor and manage health. Once limited to smart watches, and designed to track consumer fitness with tools such as blood pressure monitors and continuous glucose level tracking, today’s wearables extend far beyond step counts and heart rate tracking. Smart prosthetics equipped with AI, biosensor-laden patches for real-time diagnostics, and even brain-computer interfaces are pushing the boundaries of how technology integrates with the human body. In rehabilitation, exoskeletons help patients regain mobility, and in chronic disease management, remote monitoring wearables provide doctors with continuous patient data. But wearables aren’t just about tracking and assisting anymore—they’re actively shaping real-time medical interventions.
Nowhere is this more evident than in the surgical suite, where wearable technology is rapidly evolving into a critical tool for precision and control. Surgeons now use head-mounted displays to overlay augmented reality (AR) guidance onto procedures, while robotic exoskeletons enhance precision and reduce fatigue during long surgeries. The next frontier? Integrating wearables directly into surgical robotics to solve some of the most fundamental challenges in precision surgery—stabilizing robotic systems in real time to compensate for patient movement. A groundbreaking example of this is the head-mounted robotic system for ophthalmic surgery, which eliminates relative movement between the patient and the robotic tools. This innovation isn’t just an upgrade—it’s a new way of thinking about how robotics and wearable devices merge to push surgical capabilities further than ever before.
New Thinking Manifests New Engineering Solutions
Robotics engineering for surgery requires solving problems most people never even consider. One of the biggest challenges? How to stabilize robotic surgical systems when the patient moves.
In traditional surgical robotics, we focus on sub-millimeter precision, stability, and eliminating surgical fatigue. But what happens when the patient themselves introduces movement—breathing, subtle head shifts, even a heartbeat?
Every Movement Matters in Microsurgery
If you’ve ever tried to draw a straight line while your hand shakes even slightly, you understand the challenge. Now, imagine that at a surgical scale where every micron counts. In ophthalmic surgery, even the slightest unintended movement—whether from the surgeon’s hand or the patient’s reflexive actions—can mean the difference between a perfectly executed procedure and a significant complication. Traditional surgical robotics have made remarkable strides in stabilizing surgeon movements, reducing hand tremors, and providing ultra-precise instrument control. However, these advancements primarily address the surgeon’s actions, not the patient’s involuntary motions—an issue that becomes far more critical in delicate, vision-related procedures.
Ophthalmic surgery is uncharted territory for robotics. Unlike orthopedic or laparoscopic procedures, where the patient is under general anesthesia, eye surgery patients are often awake. That means their breathing, blinking, and even snoring can create micro-movements that challenge even the most advanced robotic systems. The eye itself is a highly dynamic organ, constantly adjusting and making tiny corrective movements in response to external stimuli, even when the patient is consciously trying to stay still. Traditional stabilization methods, such as restraining a patient’s head or using external fixation devices, have limitations in compensating for the subtle yet continuous movements that occur naturally.
To add to the complexity, ophthalmic procedures often require entering delicate subretinal spaces or navigating microscopic layers of tissue where even a fraction of a millimeter of unintended motion could lead to complications. The difficulty isn’t just in executing precise movements—it’s in ensuring that the surgical environment itself remains stable throughout the procedure. This challenge has driven engineers and medical experts to seek new ways to integrate stabilization directly into the surgical setup itself rather than relying solely on surgeon-controlled robotic systems. As a result, emerging solutions, like the head-mounted robotic system, are shifting the paradigm by making the patient and robotic system move as one unified structure—a breakthrough that could redefine the future of robotic microsurgery.
Wearable Medical Devices for Surgical Stability: The Groundbreaking Solutions
At the University of Utah’s Moran Eye Center, engineers and medical experts have developed a head-mounted robotic system to solve this problem. (Click here to read Science Robotics coverage of it).
Here’s how it works:
- Helmet-Mounted Stability: The patient wears a custom-printed helmet fitted with a robotic system.
- Eliminates Relative Movement: If the patient moves, the robotic system moves with them, maintaining perfect alignment.
- Micron-Level Precision: The system compensates for tremors, breathing, and involuntary movements with movements as small as one micron.
- Haptic Interface for “Superhuman” Precision: The robotic system scales down the surgeon’s hand movements, increasing control.
Synchronistic Engineering in Robotics Systems
Instead of trying to make surgical robots independent of the patient’s movement, this approach synchronizes the robotic system with the patient. Rather than forcing the surgeon to constantly compensate for micro-movements, the system ensures that if the patient moves, the robotic instruments move with them—eliminating relative displacement entirely. This is an incredibly elegant solution to one of the biggest challenges in ophthalmic surgery: the unpredictable nature of involuntary patient motion. While other surgical robotics rely on external stabilization methods, such as rigid fixation devices or real-time tracking algorithms, this wearable-mounted system tackles the problem at its source by integrating motion control directly into the patient’s own physiology.
The results? A new level of precision in eye surgeries that was previously unattainable. Significant improvement to patient outcomes, as well as opening a door to safer, more accurate procedures for a wider range of patient populations. It also holds the potential to reduce the need for general anesthesia in delicate ophthalmic procedures, allowing for IV sedation instead. This is not just a minor improvement—it’s a fundamental shift in how we approach surgical stability. By removing the barrier of relative motion, we’re expanding what’s possible in microsurgery, enabling procedures that once seemed too risky or impractical due to movement constraints.
This approach could influence not only ophthalmology but also other precision-demanding fields like neurosurgery, spinal procedures, and cardiovascular interventions, where micro-movements have traditionally been a limiting factor, limiting surgeons’ ability to perform crucial procedures that could improve patient quality of life significantly.
Meytar Pioneers Solutions in Robotics Engineering and Wearables
At Meytar, solving complex, high-stakes engineering challenges in surgical robotics isn’t just what we do—it’s what we excel at. When it comes to precision, stability, and advanced motion control in robotic-assisted surgery, we’ve tackled these problems before, applying multi-disciplinary expertise to create engineering solutions that push the limits of what’s possible.
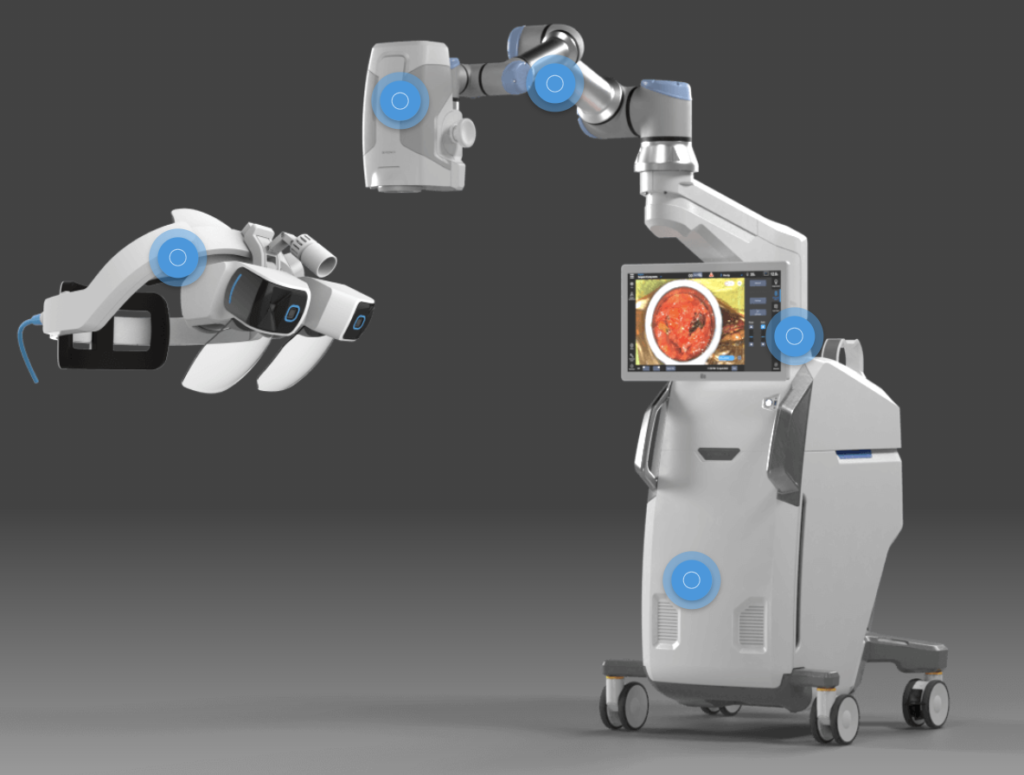
Take Beyeonics Maverick, for example—a cutting-edge robotic-assisted visualization system designed to revolutionize surgical workflows. Our contributions to this system highlight exactly the kind of expertise necessary for next-generation innovations like the head-mounted robotic system for ophthalmic surgery. Here’s how we’ve addressed similar challenges:
- Steroscopic Camera Head Unit – Well calibrated mechanical articulated arm and sophisticated surgical microscope that includes multiple mechanical elements with electronic feedback calibrated and balanced to enable the physician to move this heavy-weight piece of equipment as if as light as a feather, and to lock the equipment into place the effortlessly and with sub-millimeter accuracy.
- Augmented reality surgical displays – Enabling hands-free visualization, allowing surgeons to interact with real-time data while maintaining full control of procedures.
The challenge in front of us was to take the core technology from fifth-generation fighter jets (F22 and F35) pilots’ helmets and bring it to the operating room. However, unlike a secured fighter pilot, the helmet needed to adapt to a full range of motion (such as: as walking, leaning over the patient, etc.) and to remain lightweight, comfortable, well-balanced and useful throughout the duration of even a 10+ hour surgical procedure.
But surgical robotics is more than just precision mechanics—it’s about intelligently integrating robotics, AI, and real-time motion control into the surgical environment.
This is exactly why we see the head-mounted robotic system as a breakthrough worth celebrating. While we didn’t develop this particular innovation, it directly aligns with the kinds of engineering challenges we tackle every day: designing solutions that account for both human factors and robotic precision in ways that fundamentally improve surgical outcomes.
Looking ahead, wearable-integrated surgical robotics is an area poised for significant growth. The ability to synchronize robotic systems with patient movement, rather than merely compensating for it, represents a new frontier in motion control engineering—and it’s precisely the kind of problem Meytar engineers are built to solve. Whether it’s designing more adaptive robotic arms, integrating AI-driven real-time corrections, or advancing wearable surgical stabilization systems, we’re constantly working at the cutting edge of surgical robotics design.
Because in the world of microsurgery, where every micron counts, engineering isn’t just about building better robots—it’s about redefining what’s possible.
The Future of Wearable Devices in Surgical Robotics
This innovation makes us ask: What’s next?
- Could wearable technology such as stabilization systems enhance spinal or cardiovascular surgery?
- How could AI-powered real-time motion tracking further improve robotic-assisted precision?
- What happens when we integrate AR-guided robotics with patient-mounted stabilization?
We don’t just think about surgical robotics as it exists today. We think about what’s next. And when it comes to pushing the limits of motion correction, AI-driven robotics, and high-precision surgical stability (for example, initiatives being launched at NYEE), Meytar is ready to lead the charge.
The best engineering isn’t just about what you build—it’s about how you solve problems. This head-mounted robotic system is a fantastic example of surgical robotics thinking outside the box. At Meytar, we thrive on these challenges. We’re inspired by innovations like this, and we’re always looking for the next problem to solve.
What’s the next big frontier in surgical robotics? Let’s build it.
Ready to learn more about the fast-turnaround innovative engineering solutions that the Meytar team can bring to you? Click here to reach out and set up a chat today.